开源
SOARLAB 的开源项目、论文代码和研究工具。
Open systems for flying general intelligence
开源项目
SOARLAB 坚持把可复现系统、真实机器人平台和研究工具开源出来。这里汇总实验室新项目以及与代表论文对应的代码、项目主页和硬件平台。
实验室项目
SOARLAB · Agent Tooling
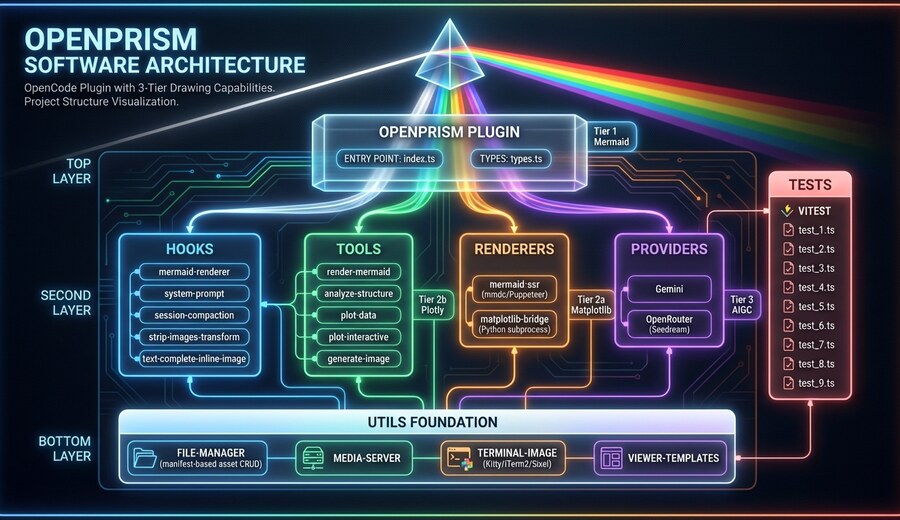
OpenPrism
Loading stars...
面向 OpenCode 生态的多层级绘图插件,把 Mermaid 结构图、Matplotlib 论文级可视化、Plotly.js 交互图表和 AIGC 图像生成带到 AI coding agent 工作流中。
论文关联项目
IROS 2026
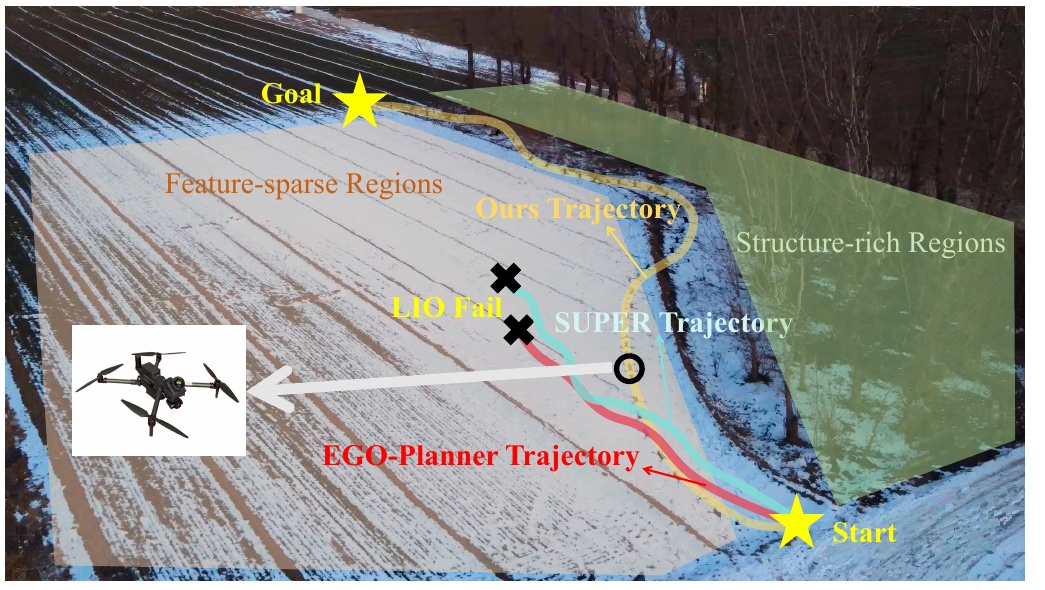
AUG
A perception-aware UAV graph-based planner for GNSS-denied navigation in feature-sparse environments. It routes through structure-rich corridors and keeps the onboard estimator better conditioned.
人形机器人遥操作

TISA
面向人形机器人遥操作的地形与意图感知共享自治系统。TISA 在预测安全时保留全身直接控制,并在高风险地形接触附近委托可执行意图。
TRO 2025

FINT
Loading stars...
对应论文 Autonomous Flights Inside Narrow Tunnels,面向狭窄隧道自主飞行的系统与代码。
IROS 2024
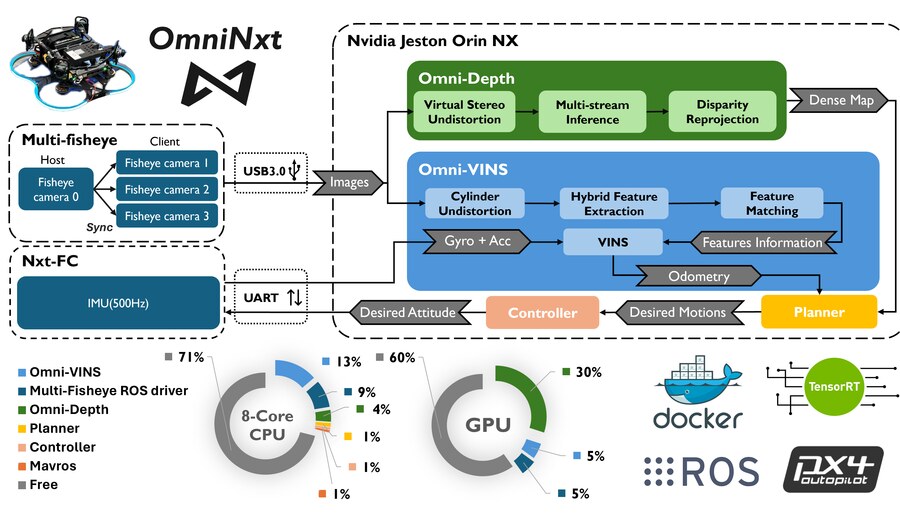
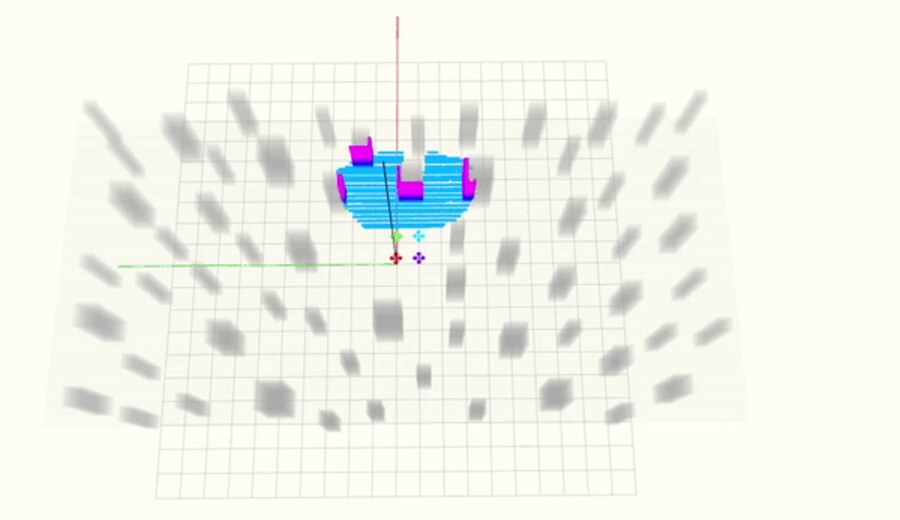
OmniNxt
Loading stars...
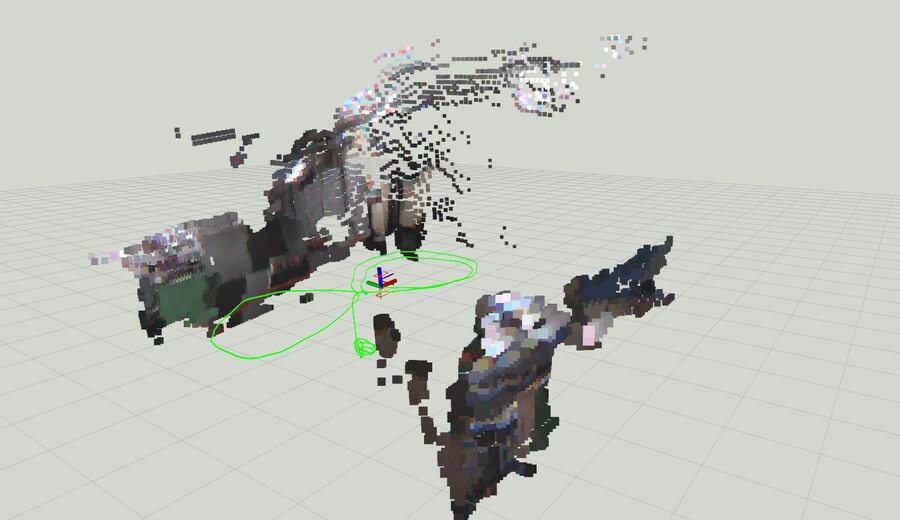
开源、紧凑、具备全向视觉感知能力的无人机平台,支持全向定位、稠密建图与真实飞行验证。
TRO 2024
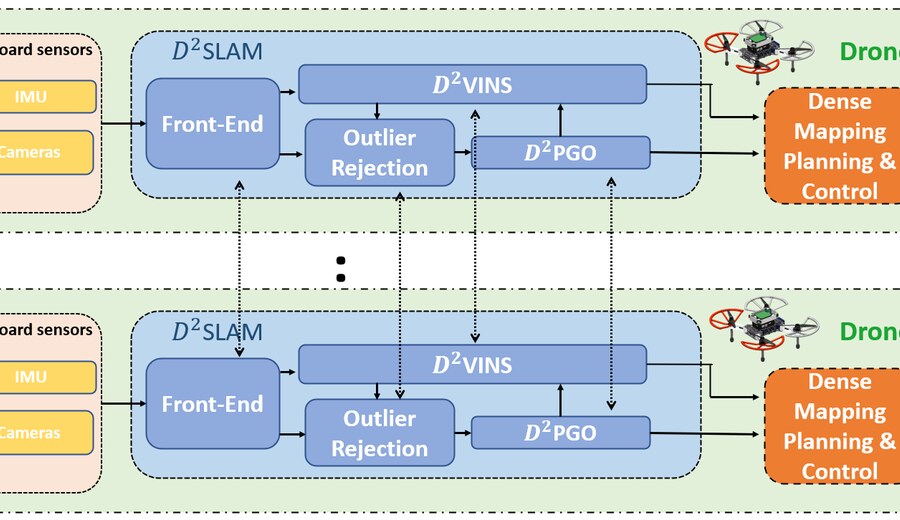
D2SLAM
Loading stars...
面向无人机集群的去中心化、分布式协同视觉惯性 SLAM 系统,强调近场相对状态估计和全局一致性。
TRO 2023 · Best Paper
RACER
Loading stars...
去中心化多无人机快速协同探索系统,获 IEEE TRO King-Sun Fu Memorial Best Paper Award。
TRO 2022
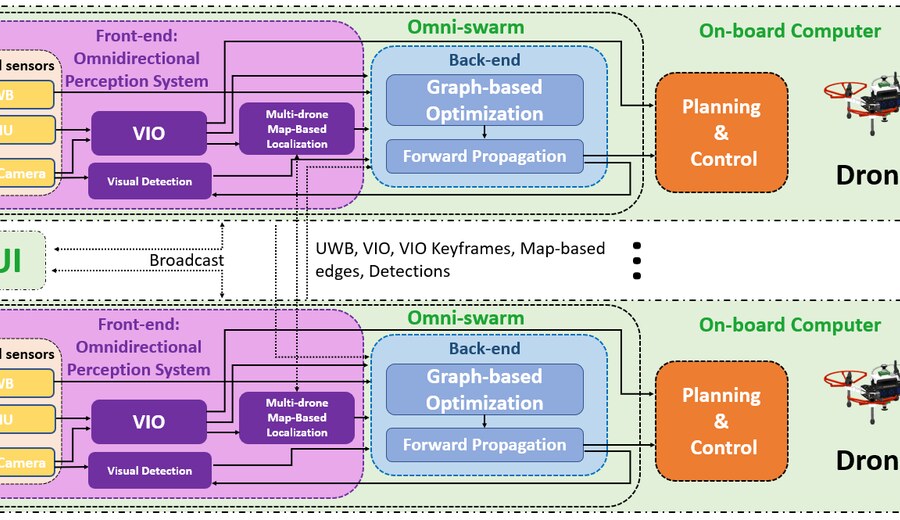
Omni-Swarm
Loading stars...
面向无人机集群的全向视觉惯性 UWB 状态估计系统,支撑厘米级相对状态估计和集群一致性。
SLAM Software
VINS-Fisheye
Loading stars...
VINS-Fusion 的鱼眼版本,支持 GPU/VisionWorks 加速,是 Omni-Swarm 系统的一部分,也可独立用于机器人定位。