publications
Selected publications by Hao Xu and collaborators.
The list below highlights representative publications most relevant to SOARLAB. For the full and latest publication list, please see Google Scholar.
2026
2025
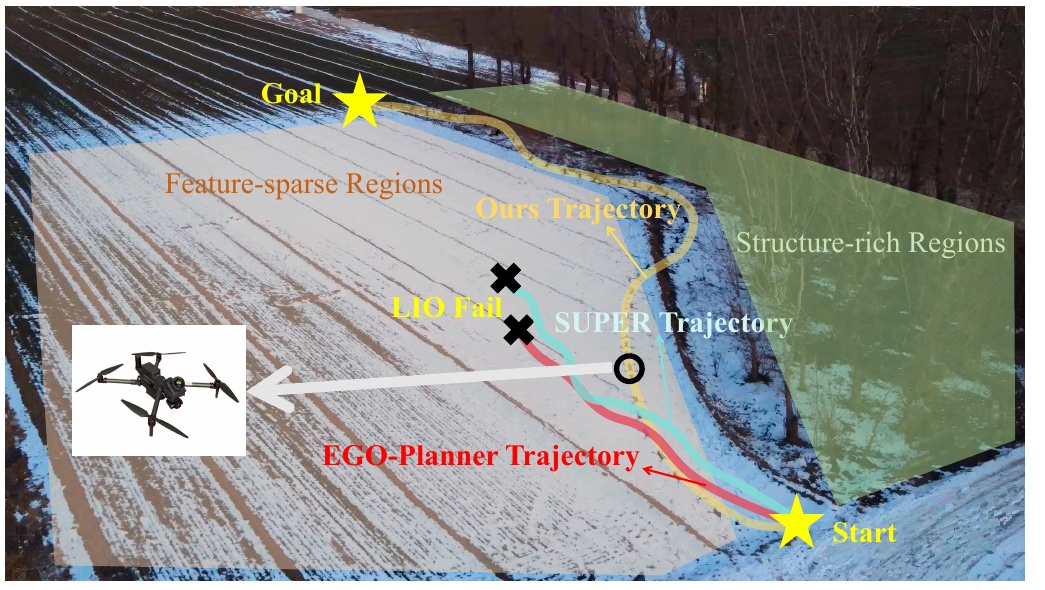
- Autonomous Flights Inside Narrow TunnelsIEEE Transactions on Robotics, 2025
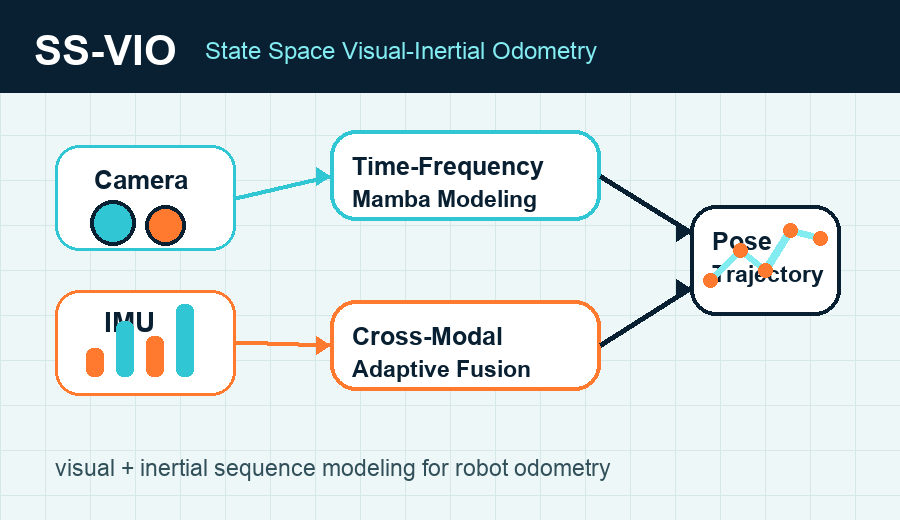
- SS-VIO: A Novel Cross Modal State Space Visual Inertial OdometryIEEE Robotics and Automation Letters, 2025
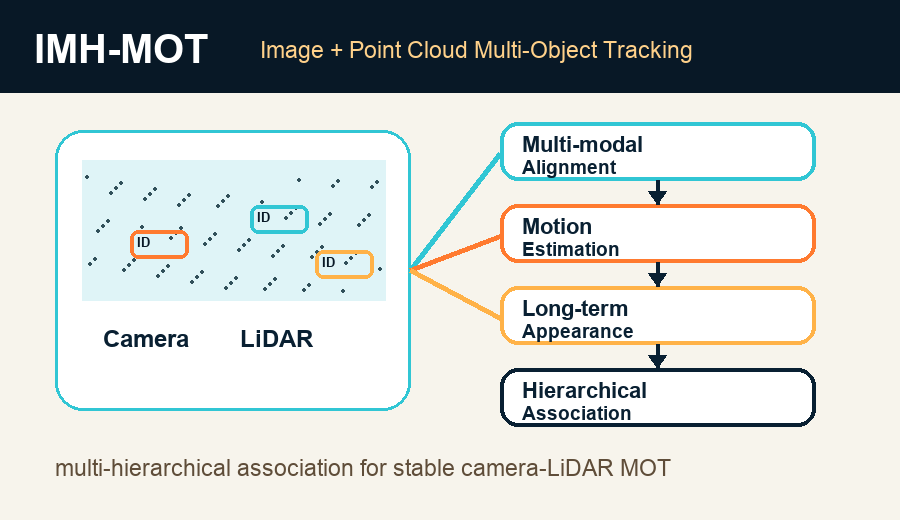
- IMH-MOT: Interactive Multi-Hierarchical Image and Point Cloud Fusion for Multi-Object TrackingIEEE Robotics and Automation Letters, 2025

2024
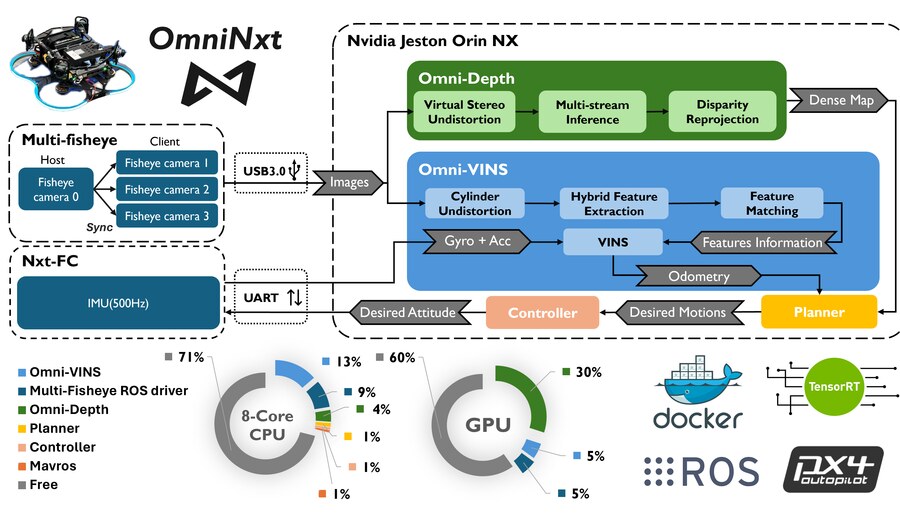
- OmniNxt: A Fully Open-Source and Compact Aerial Robot with Omnidirectional Visual PerceptionIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
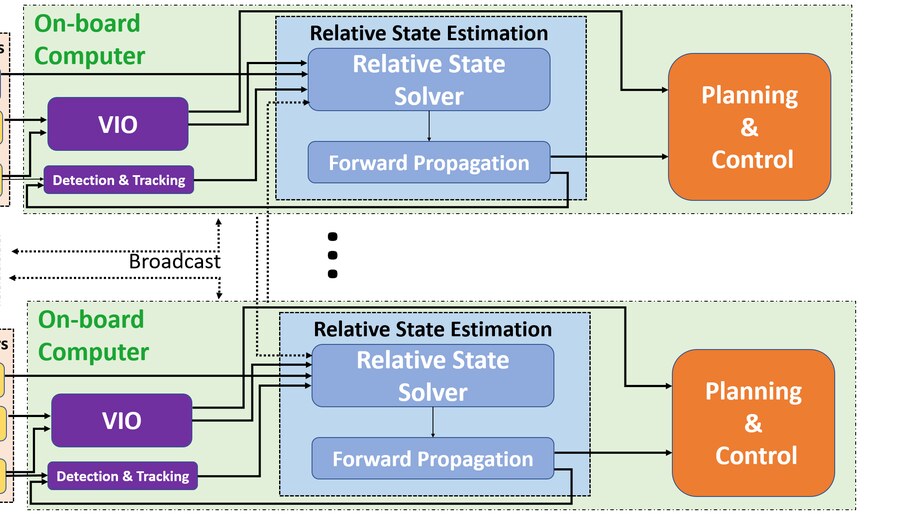
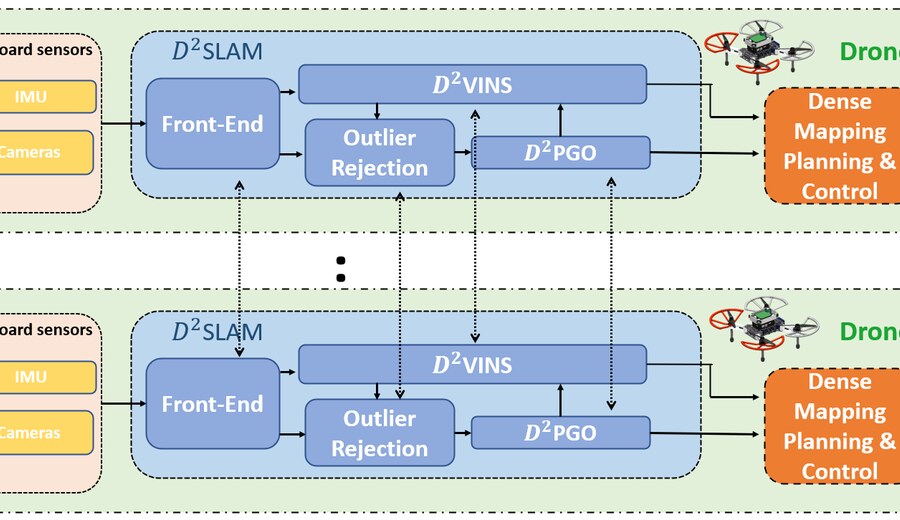
- D2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial SwarmIEEE Transactions on Robotics, 2024
2023
- RACER: Rapid Collaborative Exploration With a Decentralized Multi-UAV SystemIEEE Transactions on Robotics, 2023
2022
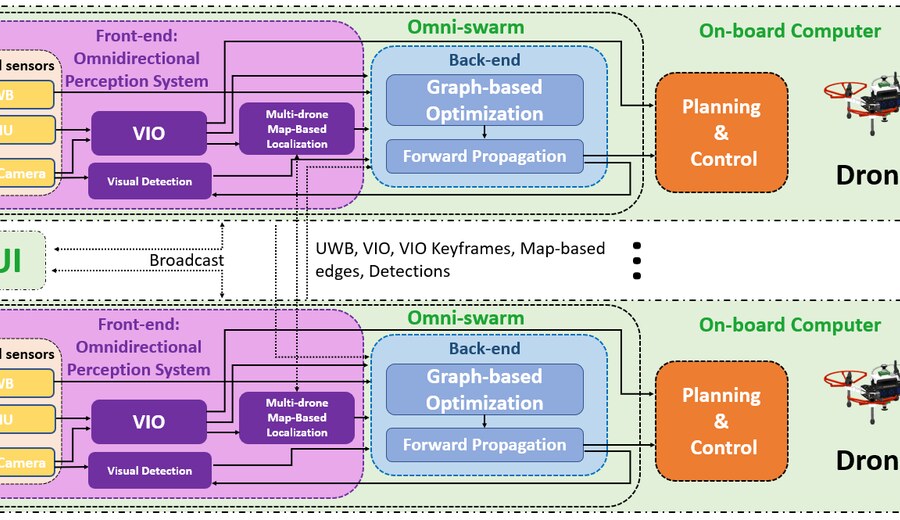
- Omni-Swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial SwarmsIEEE Transactions on Robotics, 2022
- Neither Fast nor Slow: How to Fly Through Narrow TunnelsIEEE Robotics and Automation Letters, 2022

2020
- Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial SwarmIn IEEE International Conference on Robotics and Automation, 2020