open source
Open-source projects, paper code, and research tools from SOARLAB.
Open systems for flying general intelligence
Open Source
SOARLAB releases reproducible systems, real-robot platforms, and research tools. This page collects new lab projects and code/project pages connected to representative publications.
Lab Projects
SOARLAB · Agent Tooling
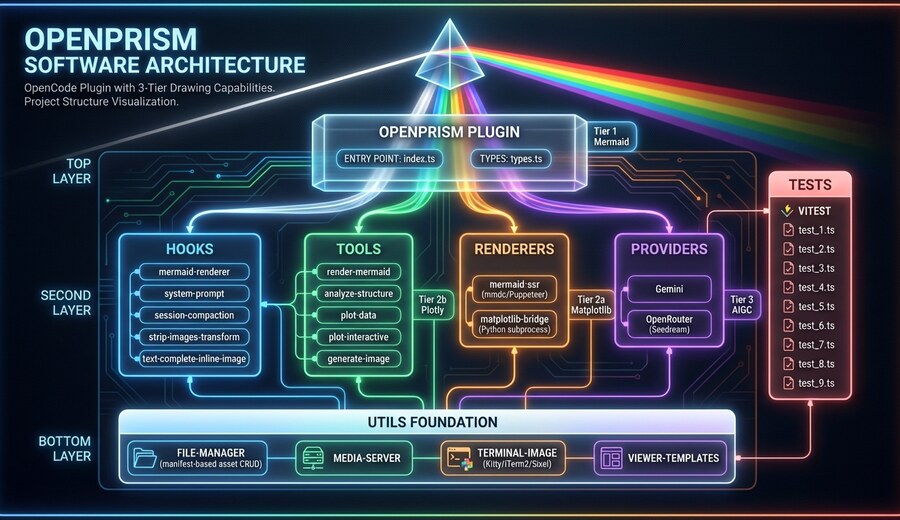
OpenPrism
Stars loading...
A multi-tier drawing plugin for the OpenCode ecosystem, bringing Mermaid diagrams, Matplotlib publication-quality plots, Plotly.js interactive charts, and AIGC image generation into AI coding-agent workflows.
Paper-Linked Projects
IROS 2026
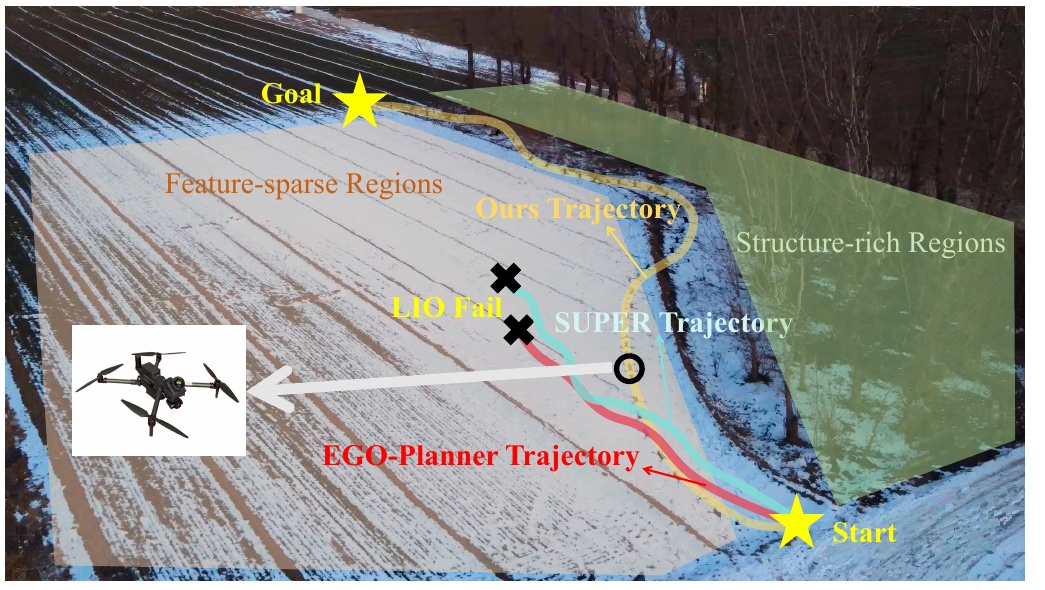
AUG
A perception-aware UAV graph-based planner for GNSS-denied navigation in feature-sparse environments. It routes through structure-rich corridors and keeps the onboard estimator better conditioned.
Humanoid Teleoperation

TISA
Terrain- and intent-aware shared autonomy for humanoid teleoperation. TISA preserves direct whole-body authority when predicted safe and delegates executable intent near risky terrain contacts.
TRO 2025

FINT
Stars loading...
Code and system resources for Autonomous Flights Inside Narrow Tunnels, targeting autonomous flight in narrow tunnel environments.
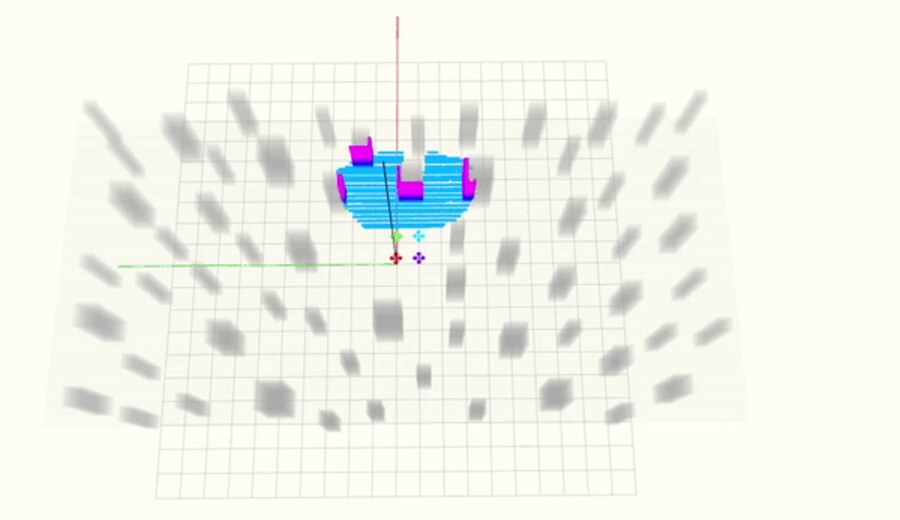
IROS 2024
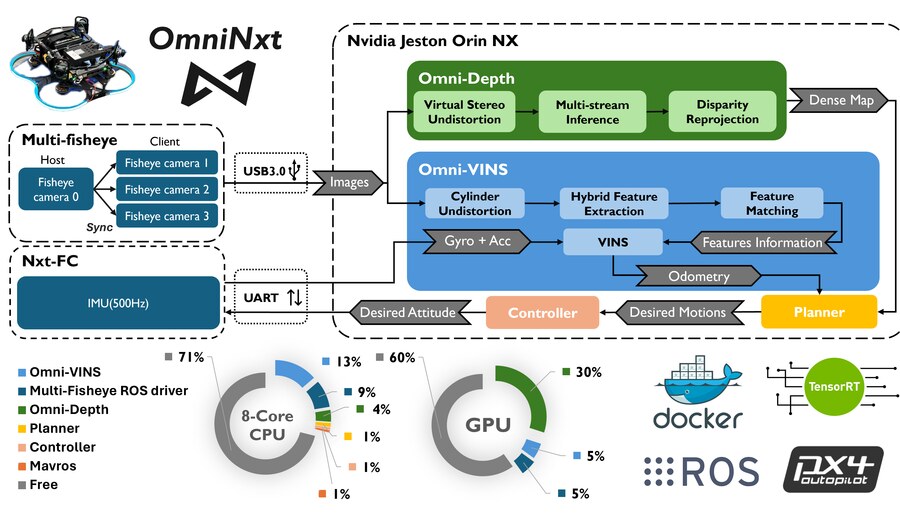
OmniNxt
Stars loading...
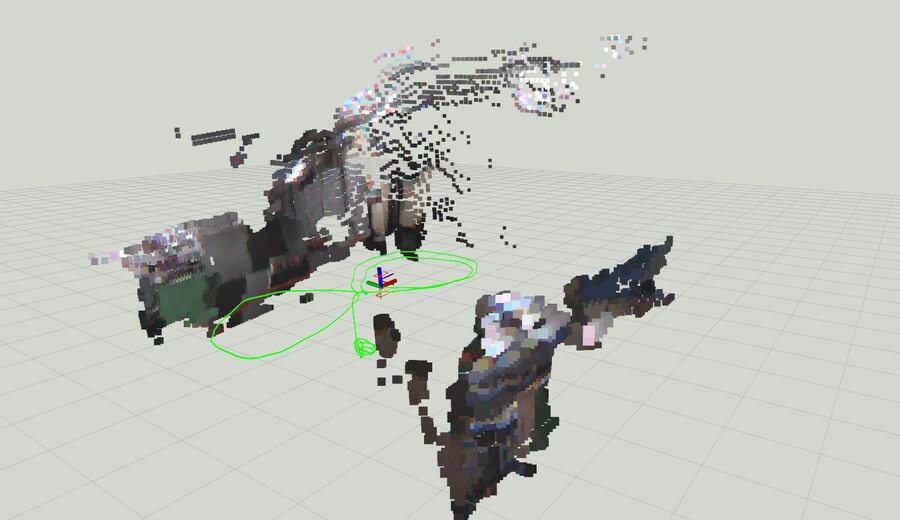
An open-source compact aerial robot with omnidirectional visual perception for localization, dense mapping, and real-world flight validation.
TRO 2024
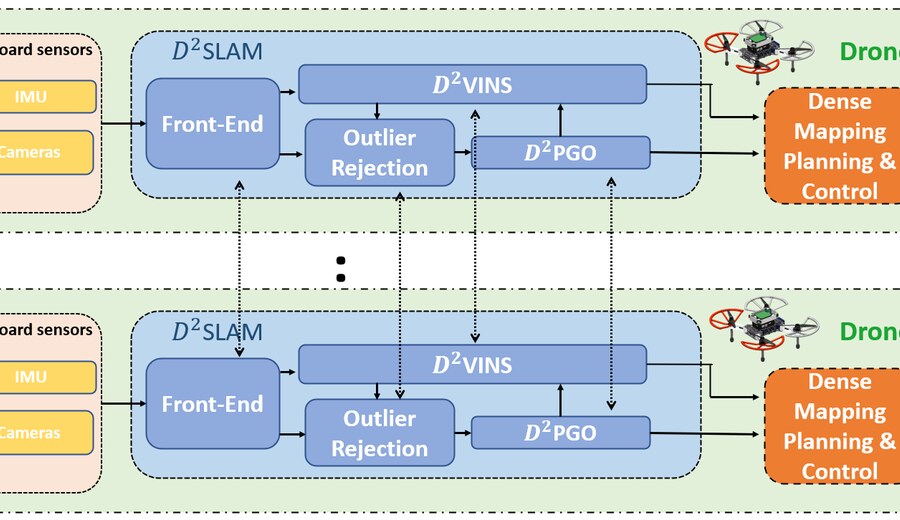
D2SLAM
Stars loading...
A decentralized and distributed collaborative visual-inertial SLAM system for aerial swarms, covering near-field relative estimation and globally consistent trajectories.
TRO 2023 · Best Paper
RACER
Stars loading...
A decentralized multi-UAV rapid collaborative exploration system and IEEE TRO King-Sun Fu Memorial Best Paper Award winner.
TRO 2022
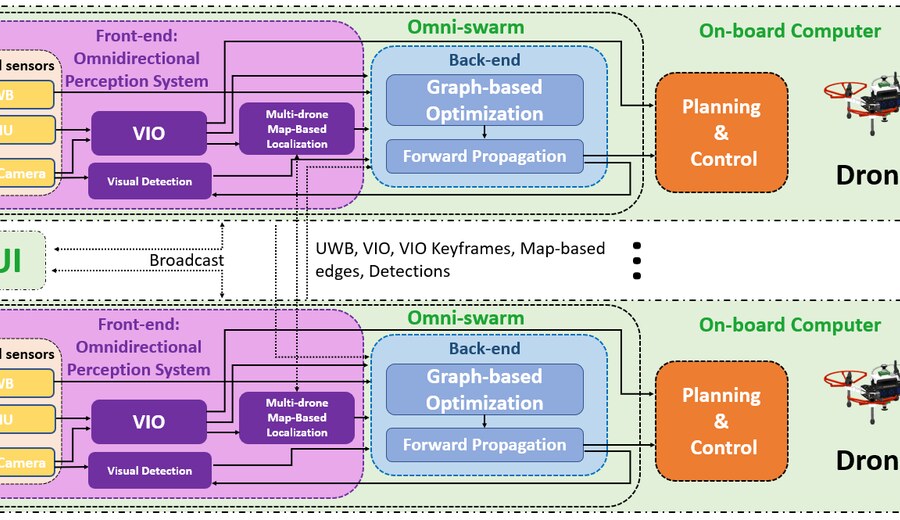
Omni-Swarm
Stars loading...
A decentralized omnidirectional visual-inertial-UWB state-estimation system for aerial swarms, supporting centimeter-level relative estimation and global consistency.
SLAM Software
VINS-Fisheye
Stars loading...
A fisheye version of VINS-Fusion with GPU/VisionWorks acceleration. It is part of Omni-Swarm and can also be used independently for robot localization.