SOARLAB
Flying General Intelligence Lab
SOARLAB · School of Intelligent Science and Technology, Nanjing University
Flying Robots, Embodied Agents, Real Systems
SOARLAB is led by Hao Xu at the School of Intelligent Science and Technology, Nanjing University. We build embodied and collaborative intelligence for aerial robots, humanoids, and emerging flying humanoid platforms, with a focus on robotics agents, world/action models, VLA-style robot foundation models, distributed perception, SLAM, and reinforcement learning.

2027 Admissions
We are recruiting direct Ph.D., regular Ph.D., and master’s students from the 2027 cohort who are interested in embodied intelligence, robotics, and core algorithms. The most urgent directions are WAM/VLA and AI agents, while strong students in distributed perception, SLAM, and reinforcement learning are also welcome.
Principal Investigator
Hao Xu received his Ph.D. from the Department of Electronic and Computer Engineering at the Hong Kong University of Science and Technology, supervised by Prof. Shaojie Shen. He has worked as a multi-sensor information fusion algorithm engineer at DJI and as an associate researcher at Beihang University, and will join Nanjing University as a tenure-track associate professor. His prior work spans spatial intelligence for aerial and legged robots, aerial swarm state estimation, distributed SLAM, and autonomous swarm systems; his future research centers on embodied and collaborative intelligence.
Research Pillars
Robotics Agent
Agent-oriented perception, planning/control, world models, simulation, and behavior decision-making for robots operating under real hardware constraints.
WAM/VLA Robot Foundation Models
World-action and vision-language-action modeling for robot foundation models validated on aerial robots, humanoids, and flying humanoid platforms.
Representative Work
Dr. Xu has published in major robotics journals and conferences including IEEE TRO, IEEE RAL, ICRA, and IROS, and serves as a reviewer for these venues. The collaborative work RACER received the IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award, the first time this award went to a team from China. His released systems include D2SLAM, Omni-Swarm, VINS-Fisheye, and FoxTracker.
selected publications
- Autonomous Flights Inside Narrow TunnelsIEEE Transactions on Robotics, 2025
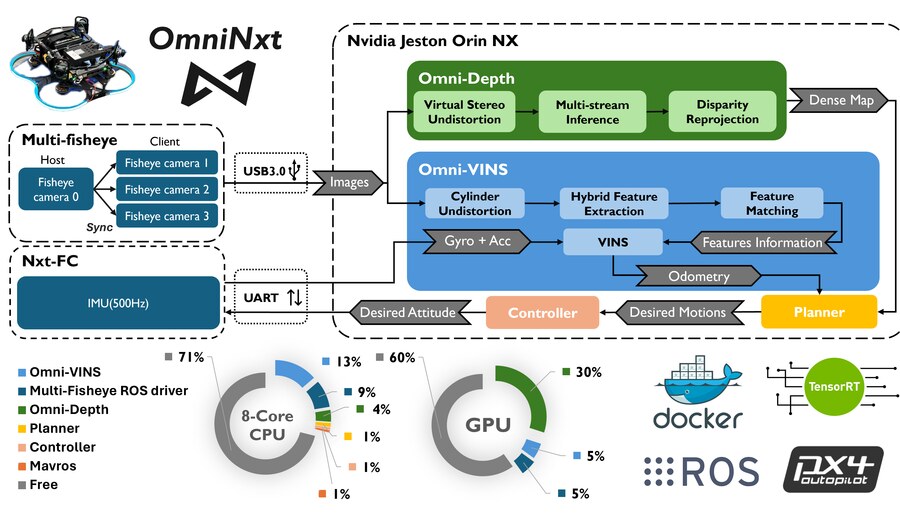
- OmniNxt: A Fully Open-Source and Compact Aerial Robot with Omnidirectional Visual PerceptionIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
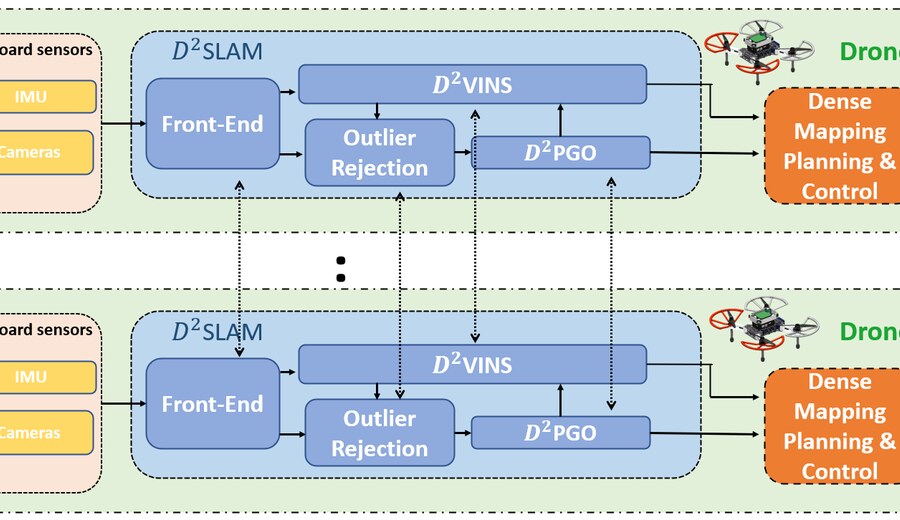
- D2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial SwarmIEEE Transactions on Robotics, 2024
- RACER: Rapid Collaborative Exploration With a Decentralized Multi-UAV SystemIEEE Transactions on Robotics, 2023
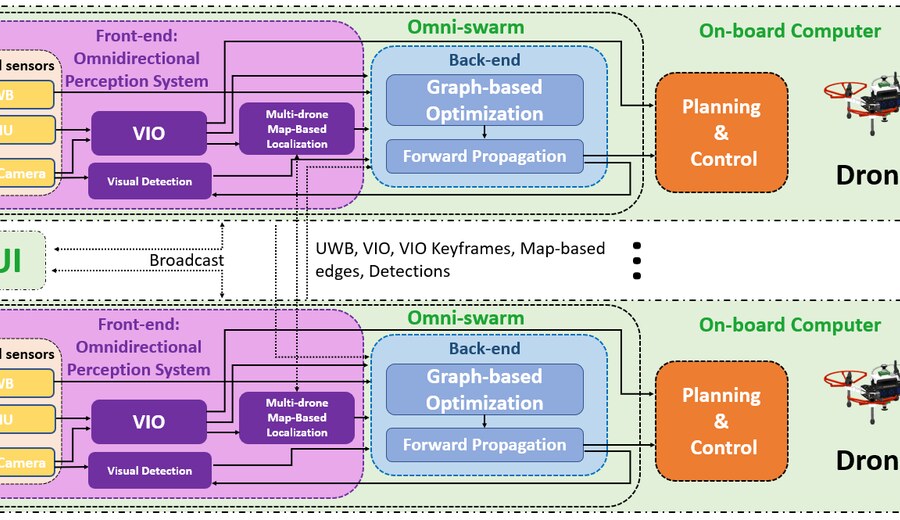
- Omni-Swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial SwarmsIEEE Transactions on Robotics, 2022
- Neither Fast nor Slow: How to Fly Through Narrow TunnelsIEEE Robotics and Automation Letters, 2022
- Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial SwarmIn IEEE International Conference on Robotics and Automation, 2020