SOARLAB
飞行通用智能课题组
SOARLAB · 南京大学智能科学与技术学院
飞行机器人、具身智能与真实系统
SOARLAB 由徐浩老师独立指导,即将在南京大学智能科学与技术学院开展工作。课题组围绕无人机、人形机器人和飞行人形机器人三个硬件平台,研究 Robotics Agent、WAM/VLA 驱动的机器人基础模型、分布式感知、SLAM 与强化学习等核心方向。

2027 级招生
面向 2027 级相关专业同学,课题组招收对具身智能、机器人及核心算法感兴趣的直博生、普博生和硕士研究生。我们目前最急需在 WAM/VLA 与 AI Agent 方向推进,也欢迎对分布式感知、SLAM、强化学习等经典方向有扎实兴趣的同学。
导师简介
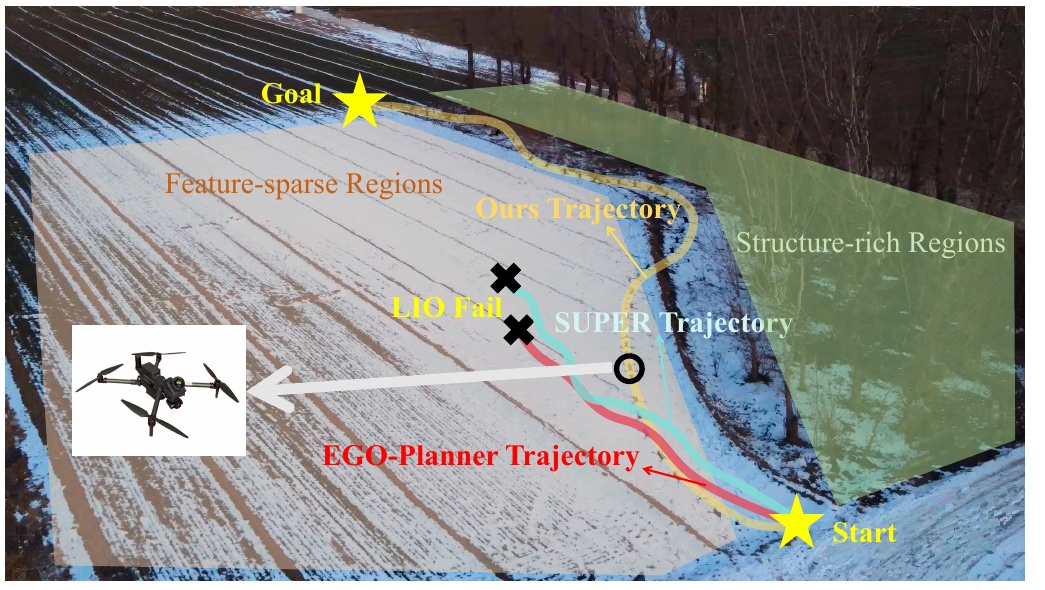
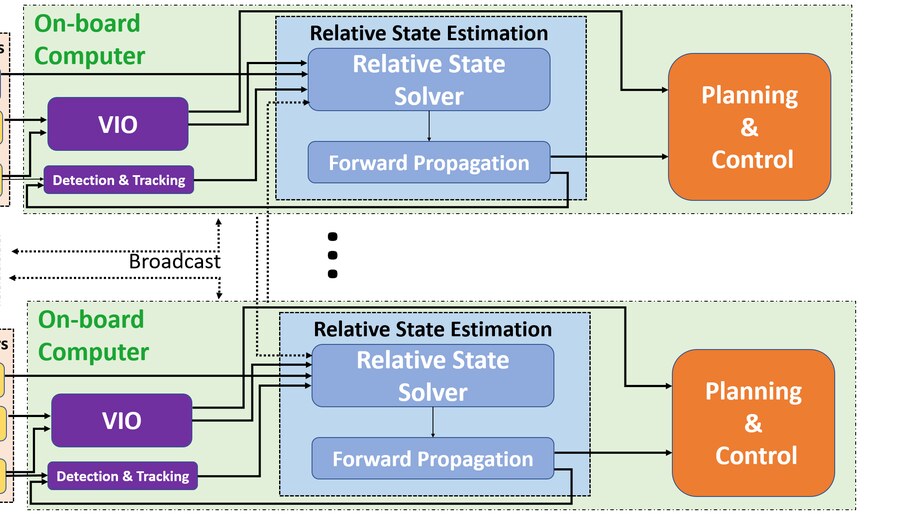
徐浩博士毕业于香港科技大学电子及计算机工程系,师从沈劭劼教授。先后担任大疆多源信息融合算法工程师、北京航空航天大学副研究员,近期将以准聘副教授加入南京大学智能科学与技术学院。在 DJI 期间参与研发 SLAM 2/3 定位算法并应用于 DJI Air3S 无人机;在学术研究中长期关注无人机/足式机器人的空间智能、无人机集群状态估计与分布式 SLAM、自主集群系统,未来重点发力具身智能与协同智能。
研究主线
Robotics Agent
面向 Agent 的感知、规划控制、世界模型、仿真和行为决策,让机器人能够在真实硬件约束下理解环境、生成动作并持续学习。
WAM/VLA 机器人基础模型
围绕 World-Action Model 与 Vision-Language-Action 建模,推进可在无人机、人形机器人和飞行人形机器人上验证的机器人基础模型。
代表工作
徐浩老师在 IEEE TRO、IEEE RAL、ICRA、IROS 等机器人领域顶刊顶会发表多篇论文并担任审稿人;合作论文 RACER 获 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award,为该奖项首次授予中国团队。开源与系统积累包括 D2SLAM、Omni-Swarm、VINS-Fisheye、FoxTracker 等。
新闻
| Apr 26, 2026 | 早期成员将参与课题组基础设施建设,包括计算服务器、实验场地、无人机与机器人验证平台。 |
|---|---|
| Apr 26, 2026 | 2027 招生方向 |
| Apr 26, 2026 | SOARLAB(飞行通用智能课题组)即将在南京大学智能科学与技术学院开展工作,面向 2027 级招收直博生、普博生和硕士研究生。 |
代表论文
- Autonomous Flights Inside Narrow TunnelsIEEE Transactions on Robotics, 2025
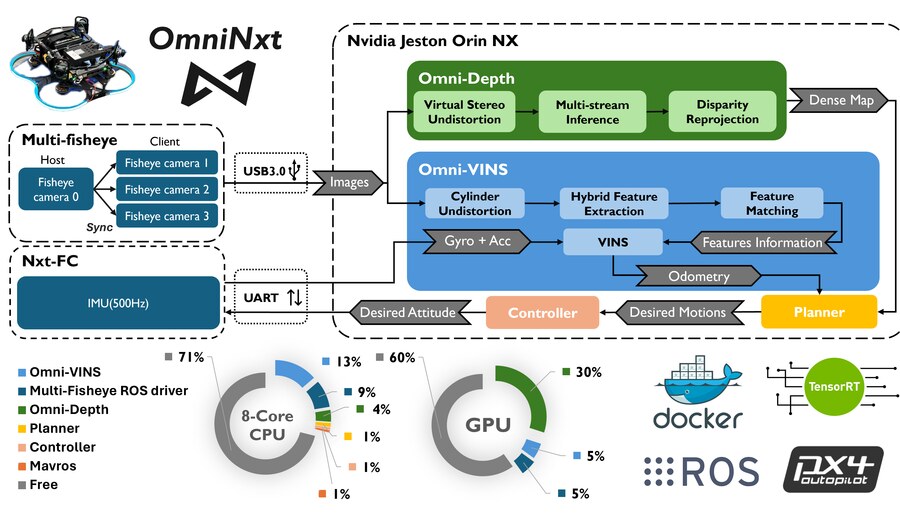
- OmniNxt: A Fully Open-Source and Compact Aerial Robot with Omnidirectional Visual PerceptionIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
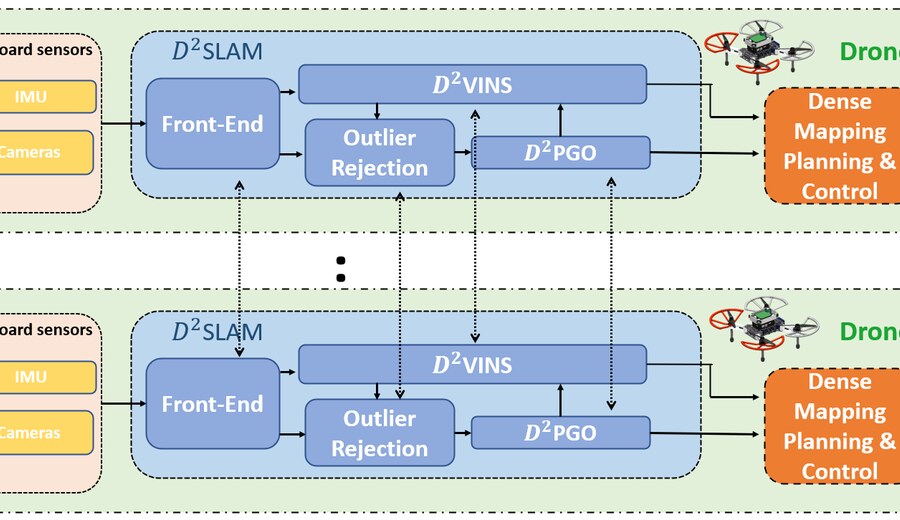
- D2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial SwarmIEEE Transactions on Robotics, 2024
- RACER: Rapid Collaborative Exploration With a Decentralized Multi-UAV SystemIEEE Transactions on Robotics, 2023
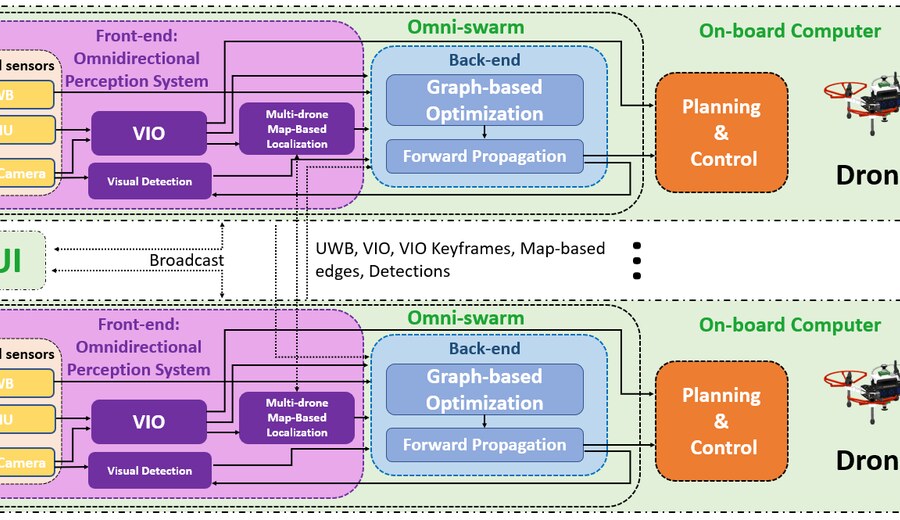
- Omni-Swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial SwarmsIEEE Transactions on Robotics, 2022
- Neither Fast nor Slow: How to Fly Through Narrow TunnelsIEEE Robotics and Automation Letters, 2022
- Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial SwarmIn IEEE International Conference on Robotics and Automation, 2020