论文
徐浩老师与合作者的代表论文。
以下列表聚焦与 SOARLAB 研究方向最相关的代表性论文。更多论文与最新版本可参考 Google Scholar。
2026
2025
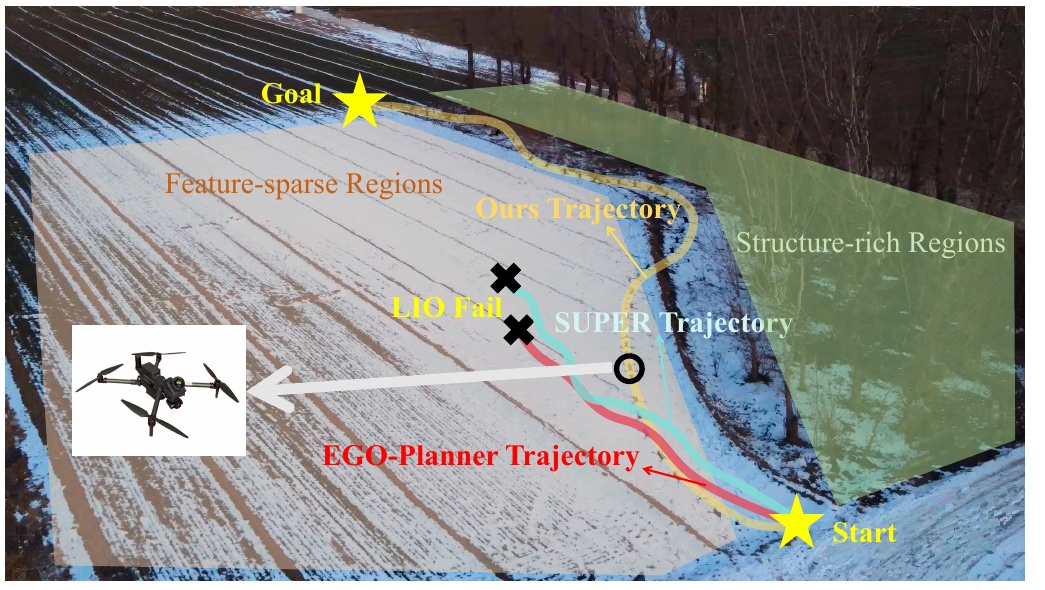
- Autonomous Flights Inside Narrow TunnelsIEEE Transactions on Robotics, 2025
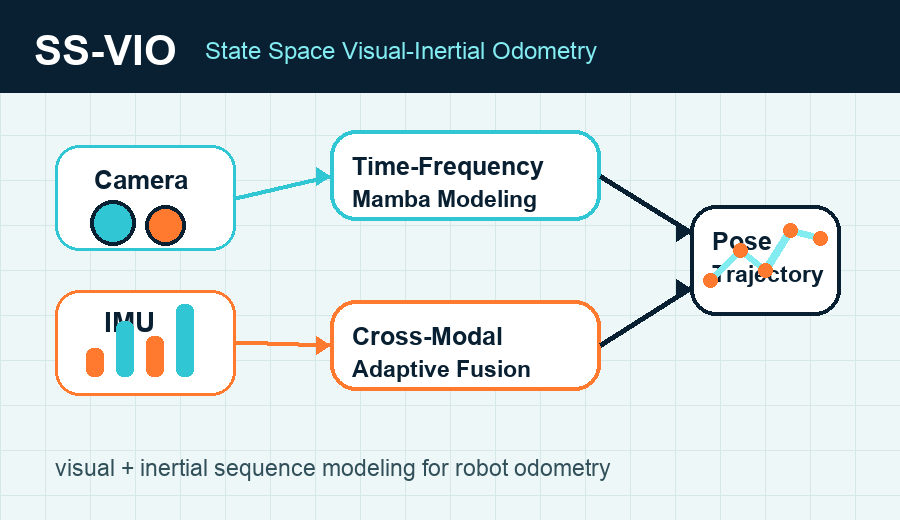
- SS-VIO: A Novel Cross Modal State Space Visual Inertial OdometryIEEE Robotics and Automation Letters, 2025
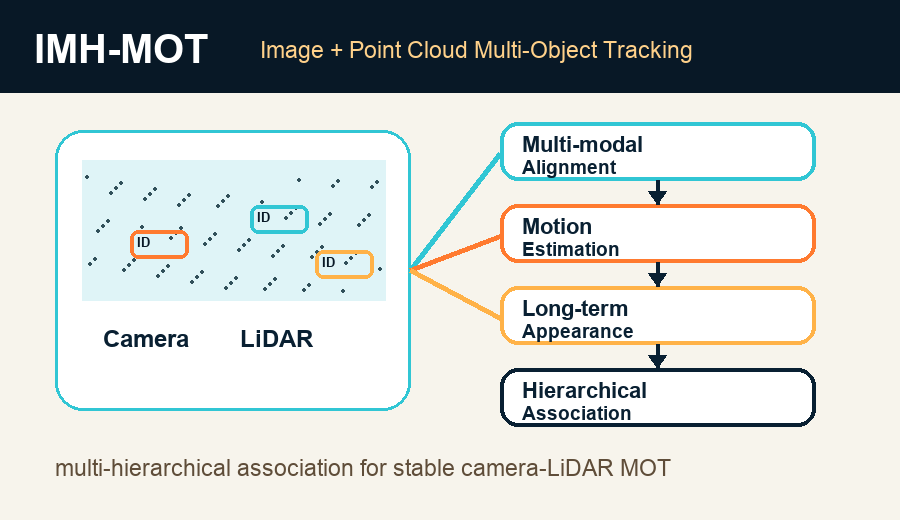
- IMH-MOT: Interactive Multi-Hierarchical Image and Point Cloud Fusion for Multi-Object TrackingIEEE Robotics and Automation Letters, 2025

2024
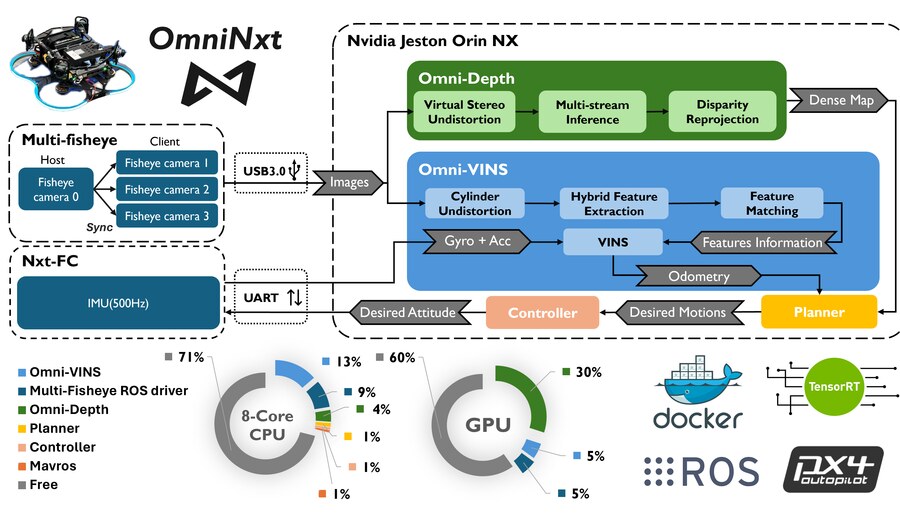
- OmniNxt: A Fully Open-Source and Compact Aerial Robot with Omnidirectional Visual PerceptionIn IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
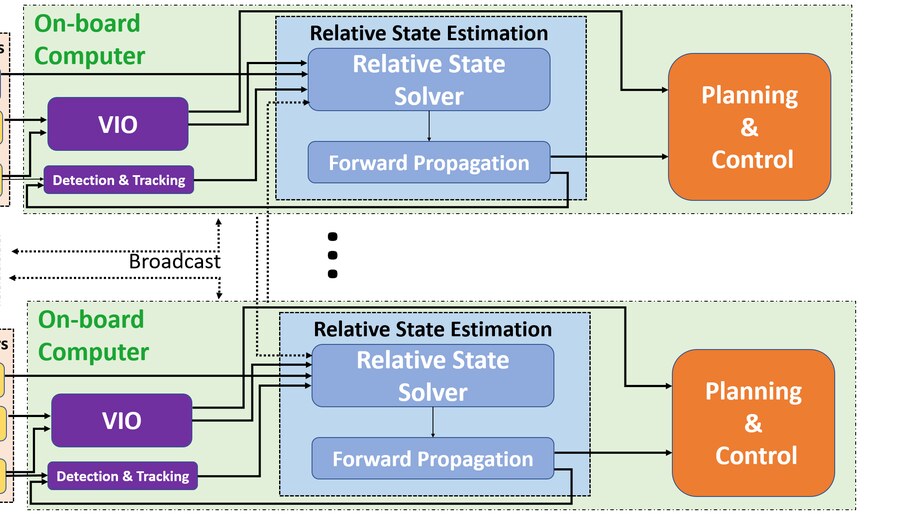
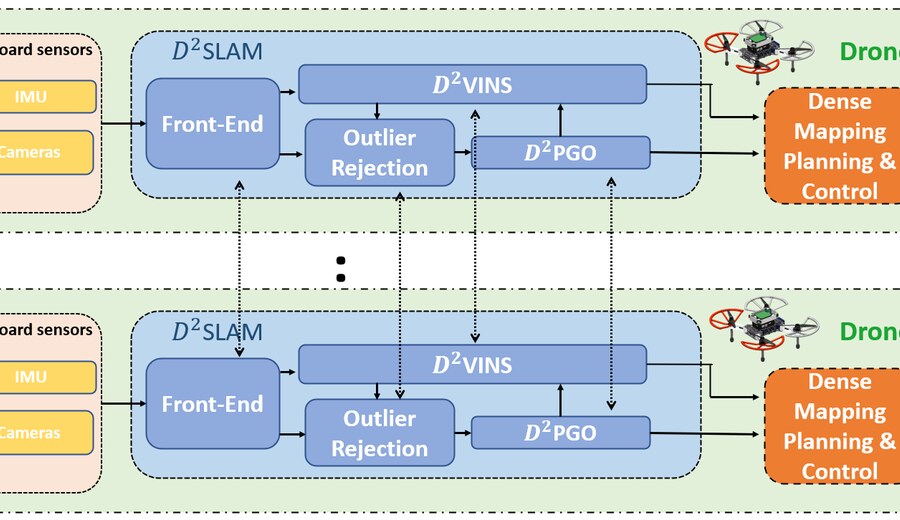
- D2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial SwarmIEEE Transactions on Robotics, 2024
2023
- RACER: Rapid Collaborative Exploration With a Decentralized Multi-UAV SystemIEEE Transactions on Robotics, 2023
2022
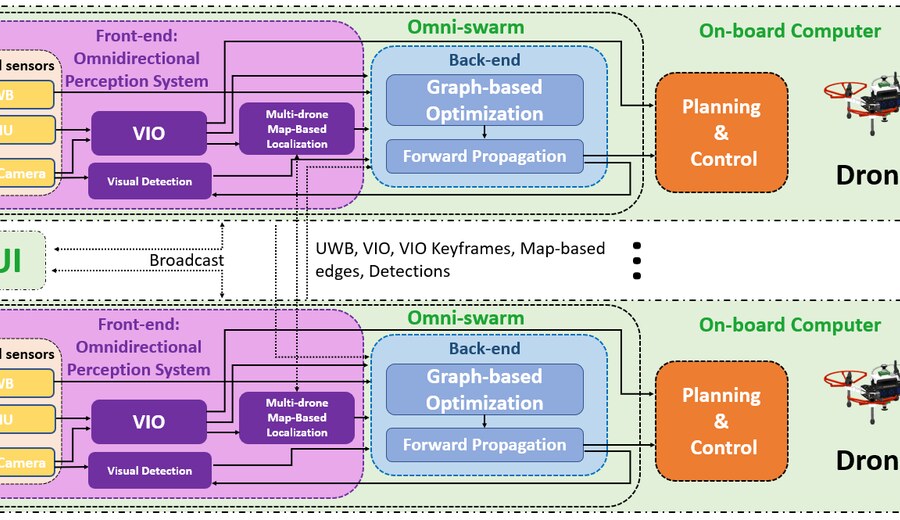
- Omni-Swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial SwarmsIEEE Transactions on Robotics, 2022
- Neither Fast nor Slow: How to Fly Through Narrow TunnelsIEEE Robotics and Automation Letters, 2022

2020
- Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial SwarmIn IEEE International Conference on Robotics and Automation, 2020