研究
SOARLAB 研究方向与平台。
SOARLAB 的目标是建设能够在真实机器人平台上验证的飞行通用智能系统。我们不把“具身智能”仅理解为大模型调用接口,而是关注感知、状态估计、控制、规划、世界模型、行为决策、数据闭环和硬件实验之间的完整链路。
两条主线

主线 01
Robotics Agent
研究面向机器人 Agent 的感知、规划控制、世界模型、仿真与强化学习,使机器人能在动态真实环境中完成任务。
主线 02
WAM/VLA 机器人基础模型
研究 World-Action Model 与 Vision-Language-Action 驱动的机器人基础模型,强调可迁移的动作生成、数据闭环和可落地的实验验证。
硬件平台
无人机
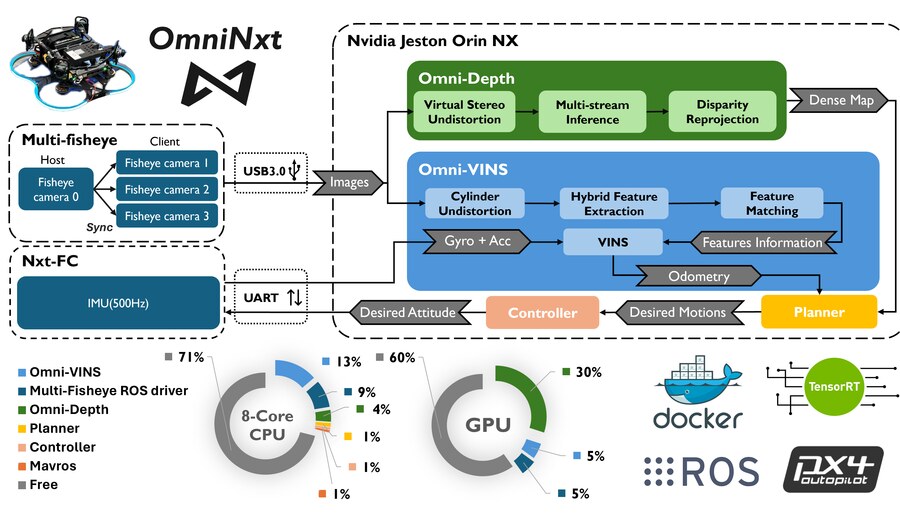
高速机动、无 GPS 环境感知定位、无人机集群状态估计、协作探索与自主系统。
人形机器人
面向具身任务的感知、规划控制、行为决策、仿真到现实迁移和世界模型。
飞行人形机器人
将飞行平台和人形平台结合,探索跨形态机器人通用智能和协同智能。
传统优势与新方向
空间智能与 SLAM
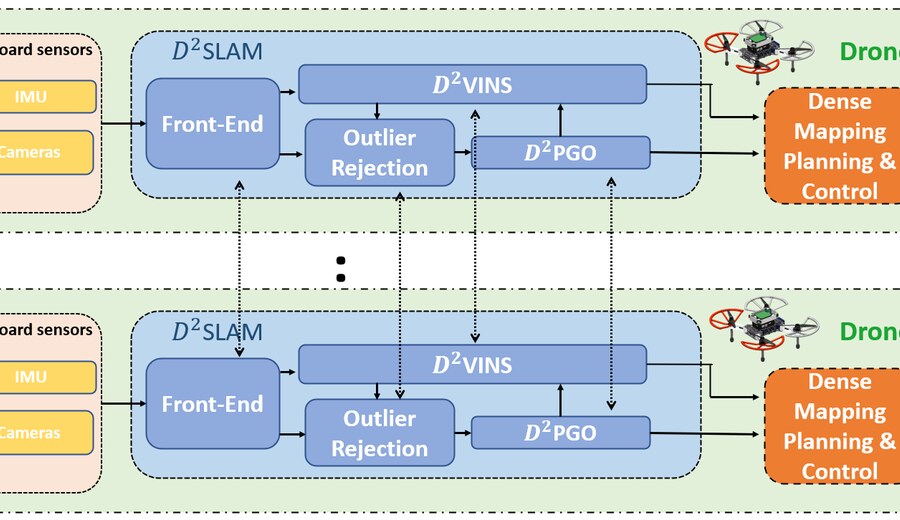
课题组继承无人机和足式机器人空间智能方向积累,包括视觉惯性状态估计、分布式 SLAM、协同感知、多机器人一致性优化,以及在真实硬件中的系统部署。
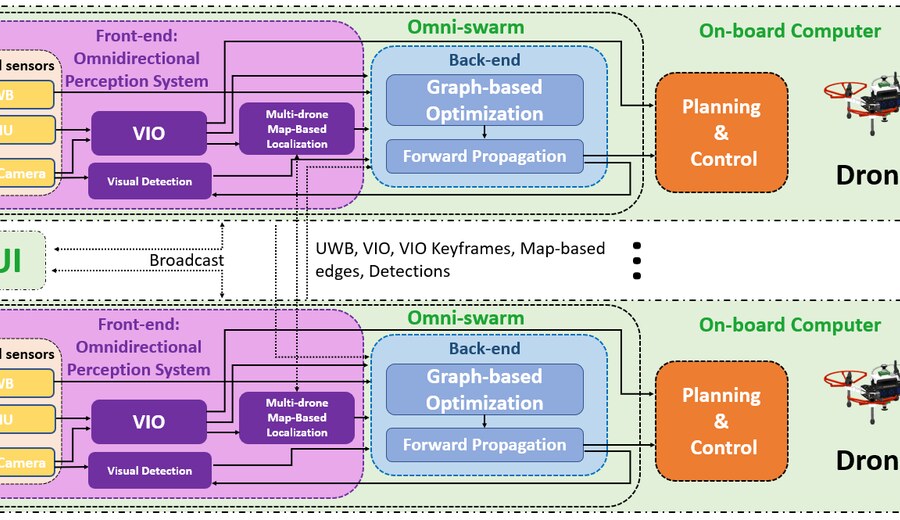
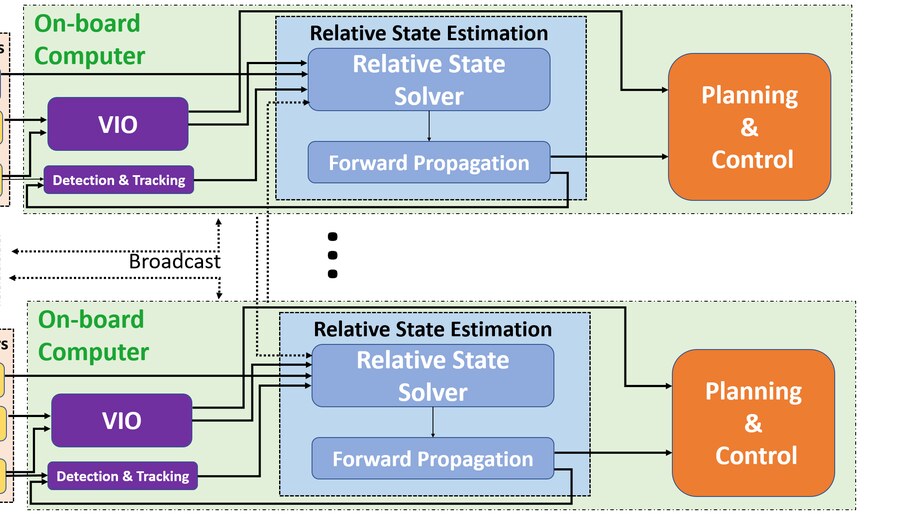
无人机集群
我们关注无 GPS 环境下的无人机集群状态估计、协同探索和自主运行。代表工作包括 Omni-Swarm、D2SLAM 和 RACER 等系统。
具身智能与协同智能
未来重点发力具身智能与协同智能,包括强化学习、Agent 行为决策、多模态大模型与物理机器人系统结合,以及面向机器人基础模型的数据与评测闭环。
开源与系统
已发布或参与发布的系统包括 D2SLAM、Omni-Swarm、VINS-Fisheye、FoxTracker 等。新一阶段课题组将继续坚持“算法必须能上真实机器人”的标准。